
各位车友,先问个问题:你敢在高速上双手离开方向盘刷手机吗?最近和几位新能源车主聊天,发现个耐人寻味的现象——智能辅助越完善的车,部分驾驶员反而越容易"放飞自我"。这背后折射出的,正是智能汽车时代的安全底线之争。

一、技术越进化,警惕越该进化
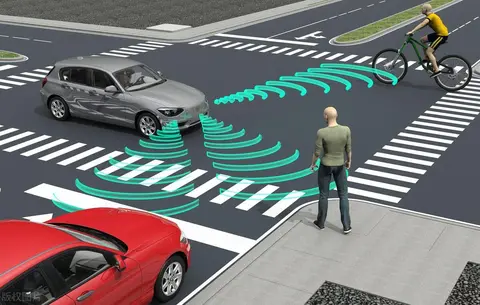
上周试驾某品牌的L2.5级辅助驾驶系统,在封闭路段确实表现出色:自动变道像老司机般流畅,车道保持精准到毫米级。可当我把测试场景换到早晚高峰的环路,情况就变了:前车突然加塞时,系统需要1.5秒才能识别并降速,而人类司机往往0.8秒就能做出反应。这多出的0.7秒,在时速60公里时意味着多滑出12米。

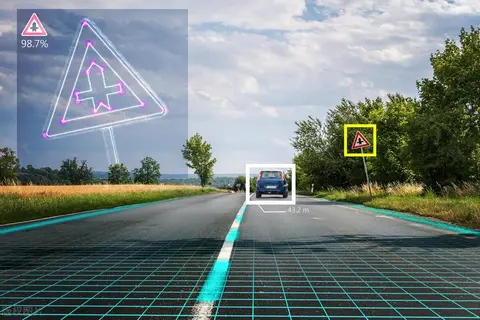
行业数据显示,搭载辅助驾驶的车辆在标准测试中的紧急制动成功率达97%,但在真实复杂路况中,这个数值可能跌到60%以下。就像21年某品牌"自动驾驶"演示中,测试车突然将月亮误判为交通信号灯,这种"低级错误"恰恰暴露出AI决策的局限性。
二、人机共驾不是"甩手掌柜"游戏
在硅谷某自动驾驶公司工作的朋友透露,他们内部有个黑色幽默:每当系统升级后,工程师反而更紧张了。"因为用户会放松啊!"他苦笑道。这让我想起某车企用户调研中的典型反馈:"开了三个月自适应巡航,现在上高速不摸方向盘总觉得少了点什么。"

这种心理依赖有多危险?去年底某品牌车主在高速上开启辅助驾驶后呼呼大睡,直到追尾前车才被惊醒。虽然是个案,却敲响警钟:当驾驶员把系统当"全自动"用时,系统却还在"半自动"阶段。就像给三岁孩子玩具枪,他可能会当真枪使。

三、真实场景里的"致命盲区"
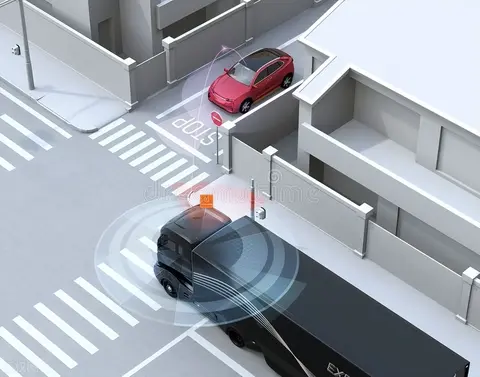
国内某权威机构做过实验:在黄昏逆光环境下,主流视觉识别系统的误报率飙升300%。这不难理解——当夕阳把前车刹车灯"融化"在暮色中时,摄像头可能比普通司机更"眼拙"。更棘手的是"边缘场景":施工锥桶摆放不规则、外卖小哥逆行驶入机动车道……这些情况往往超出算法训练数据库的范围。
最近接触到的真实案例是:某车主在暴雨天开启自动泊车,系统反复识别不清车位线,最终在狭窄车位里把轮毂刮花了。这印证了工程师的无奈:"我们能教AI识别标准车位,但教不会它应对每个停车场的'创意划线'。"

四、重构安全的三重现实路径
要守住安全底线,需要三方共同进化:
- 技术方:停止用"自动驾驶"的噱头模糊概念,就像给菜刀贴上"自动切菜"标签却不提需要人手握刀;
- 用户方:驾校该开设"人机协同驾驶"课程,让学员明白辅助驾驶不是"代驾",而是"副驾驶";
- 法规方:参考航空领域的"机组资源管理",制定"人机共驾"操作规范,明确电子系统的权责边界。

在以色列,自动驾驶公交专用道有个巧妙设计:人类司机需要考取特殊认证才能共享路权。这种"人机共治"的思路,或许能给我们启发——安全不是非此即彼的零和博弈,而是动态平衡的共生系统。

当夕阳为城市披上金纱,看着满载归家人的车辆平稳驶过,我突然想到个比喻:智能汽车就像刚学会走路的孩子,需要家长(驾驶员)时刻盯着,既要放手让它探索,又要随时准备扶住。毕竟,方向盘可以交给科技,但生命的责任永远要握在自己手里。

 渝公网安备50010502503425号
渝公网安备50010502503425号
评论·0